


对于不同的测微系统,其标定的方法原理和所用的装置以及校正的基准都会有着不同的要求。为了对精密电容测微系统进行精确的仪器校正,必须对其工作原理、传感器的结构特点和安装方式进行全面的分析研究;寻找适合其工作特点的标定原理和方法,设计完整的校正装置满足校正精度的需要。因此,下面首先进行精密电容测微系统的工作原理的分析研究。
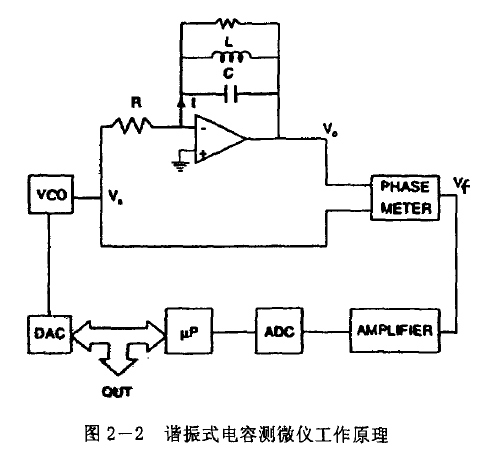
1、精密电容测微仪的工作原理
随着精密加工技术的诞生发展和天文、国防、航天工业等对零件精度要求的提高,加工设备和工件的测量精度要求也就愈来愈高。因此,近几年来各行各业纷纷推出了高分辨力、高精度的测量仪器。精密测微仪是七十年代初期,航天部为了解决《惯性导航系统陀螺的动态测试》问题首次提出的,这是因为陀螺的动态测量对提高陀螺的精度和气体轴承的研究是非常重要的。其测量主要包括轴向、径向、角刚度、轴承压力的分布、不稳定性以及振动等各个参数。由于被测对象是高速旋转体,在测量时必须采用非接触式的方法;同时由于测量的是很小气膜(约为0.2~0.3微米),因此要求测量设备必须有很高的灵敏度和精确度,只有这样才能满足被测对象的要求。
精密电容测微仪,是一种非接触式精确测量微小相对位移、微小尺寸和微振动的仪器。它具有灵敏度高、动态响应好、结构简单、稳定可靠、使用方便、并能实现无接触测量等一系列优点,因此在科研、仪器计量及工业生产加工行业中都得到了广泛的应用。电容测微仪主要应用的方面有:各种介质的薄膜厚度、金属微变、微小相对位移、微小孔径及各种截面的形状误差等,在精密机械工业测量方面取得了重要地位,成为纳米测试技术和惯导系统不可缺少的测试设备之一。所以,目前世界各发达国家对电容式精密测微的发展给予了足够的重视,并相继研制出适用于各种场合的电容检测设备。
电容测微仪一个最关键的技术问题,就是如何用合适的电路把电容传感器容量的变化准确地转化为所测参量的变化,目前常用的电容转化电路有谐振法、流桥法、调频法、调幅法。由于电容传感器本身与被所测对象构成的有效电容值很小,很容易受外界的干扰,因此无论采用那一种转换电路都必须很好的解决漂移和杂散电容对测量的影响。下面给出一些国际上比较典型和成熟的电容式精密测微系统的生产厂家和技术指标(见表2-1)。为了对各种工作原理的电容测微系统进行精确的自校正,就必须对其转化电路的基本工作原理和传感器的结构特点进行分析讨论,以便采用相应、合理的自校正装置对其进行准确的校正。

2、精密电容测微仪自校正的实现
仪器校正方法中位移比例杠杆放大结构是其基本工作原理(即经常采用的正弦尺原理)的核心,它是通过比例放大装置将被校传感器测量的位移按比例放大之后,与基准传感器所测量的结果进行比较,并将二者所测得的结果按照一定的方法进行数据处理最终确定其线性误差,从而提高被校正传感器的测量精度。我们只得到了自校正方法的理论基础,但不同的传感器的结构形式和不同测量原理的测试设备,采用的自校正的方法和校正的装置都不可能完全相同。这是因为杠杆比例放大结构在测量原理上存在两大缺陷,一是杠杆结构自身的缺点:杠杆支点的位置不确定性对位移的放大比例产生直接的影响;另外杠杆支点的转角刚度对杠杆的挠曲变形起着决定性的作用,而且这些影响非常复杂很难用简单的函数关系表达出来。而这种复杂的影响关系对自校正的准确性的影响也很复杂,不易于修正;二是比例杠杆应用在有效面积型传感器中的缺点:比例杠杆在弯曲变形时,对于被校正具有有效测量截面的传感器而言,其位移变化存在着正弦尺的原理误差,在对这类传感器进行仪器校正时必须充分考虑其对仪器校正精度的影响。对于任何形式的精密电容测微仪,由于其所使用的电容传感器都具有一定的有效测量面积,采用自校正方法进行校正时,上述杠杆比例放大结构的两种影响都是不容忽视的。根据上述仪器校正基本工作原理,对具有有效测量面积类型的传感器进行自校正时,必须对其自校正装置进行合理的设计,具体实验装置如图2-8所示。该自校正实验装置采用了两个坡度相同的比例斜块,当二者发生相对运动时,即可放大(或缩小)在其相互垂直方向上的位移,以此实现自校正过程中被测传感器测量距离放大(或缩小)的目的。采用这种位移比例放大(或缩小)装置,在接个运动过程中既没有支点的位置精度的影响也没有挠曲变形的比例非线性,从原理上解决了比例杠杆结构对有效面积类型传感器自校正精度的影响。

根据电容测微仪传感器的结构形式特点和安装方法的特殊要求,采用斜面位移比例放大结构非常适合。因为斜面式位移比例放大装置,其比例放大倍数是由两相互接触斜面的坡度来决定,只要改变斜面坡度值的大小,就可以实现任意比例放大倍数。另外,采用这种结构位移比例放大系数在整个测量过程中非常稳定,因此可以大大的提高传感器自校正的准确度和稳定性。在图2-8的自校正装置原理图中,以直径为由3mm的单极板电容传感器A和B为例进行自校正。传感器A可以通过调整装置改变其与被测面之间的距离,以便对传感器不同的测量范围段进行校正。具体的校正过程是压电驱动器推动比例斜面位移使基准传感器由测量的初始位置变化到满量程,与此同时计算机采集传感器A和B的变化量,实现校正过程的自动数据采集。由于比例斜面的放大作用被校正传感器只能校正其满量程的l/n。之后压电驱动器返回到基准传感器的初始位置,同时调整被校正传感器到刚才校正的最后一点的位置,进行下一个1/n量程的仪器校正,依次进行n次即可完成一个校正循环。另外从2-l节的推导可以看出,n值取的愈大在校正的过程中基准传感器对被测传感器误差的放大作用愈大,校正的精度就会愈高。但是n值愈大在校正过程中基准传感器安装调整的次数愈多,进行一次完整的校正的时间就会愈长,这样由于安装和校正系统的漂移引起的校正误差就会愈大。由于上述原因,如果n值取得太大,反而会降低校正的准确性。因此,在实际n值的选取中,必须进行全面的考虑选取一个折衷数值。
微驱动器作为一种能产生微米、纳米级动作的微型装置,为微机械提供动能,已成为微机械研究的一个重要支柱。由于它的输出能产生微米、纳米级的操作动作,因此在工业的各个领域中获得了广泛的应用和推广。近年来,国内外开发研究的微驱动器,按其工作原理大致可分为静电、电磁、压电、形状记忆合金、热和光驱动、超导驱动等类型,其中压电型驱动器是利用压电陶瓷的逆压电效应设计而成,是一种新型的微位移器件,具有结构简单、体积小、响应快、分辨力高、控制简单、没有发热问题等优点,是理想的微位移器件。压电驱动器的上述诸特点赋予了它广阔的应用前景和实用价值,故得到了国内外科技人员的极大关注。压电陶瓷是具有压电效应的压电材料,在经过极化处理的陶瓷体上沿其方向施加一个机械压力(或释放压力)时,陶瓷体就会产生充(放)电现象,即正压电效应;反之,若在陶瓷体上施加一个与极化方向相同(或相反)的电场,则会引起陶瓷体伸长(或缩短)的变形,即逆压电效应。我们利用压电陶瓷的逆压电效应来产生系统的微位移运动。

为了把握校正系统噪声及漂移情况,进行了如下的自校正系统稳定性实验:在自校正系统的各部分连接与仪器校正过程完全一致的情况下,将传感器Sa和Sb都调整到其满量程一半的位置,待校正系统稳定后,由计算机进行定时定间隔采集数据。图2-9是整个采样过程15min,间隔5s采样一次的测量结果。图中横坐标表示采样样本数,纵坐标表示传感器Sa和Sb的漂移量,单位(mV)。采用该自校正系统中进行仪器校正时,被校正传感器在整个测量范围内校正一遍,一般约需10min。在这期间整个系统的变化量不超过2mV(约8nm)。

在实际的校正过程中,每个数据都是取其20次采样的平均值,高频成分的影响将进一步减小。对分辨力4nm的传感器来说,其高频成分的影响可以忽略不计。虽然漂移情况往往随时间的变化而变化,图2-9是具有代表性的实例之一。从稳定性实验的结果来看,该自校正装置完全可以满足精密电容测微系统自校正稳定性的要求。

 扫一扫
扫一扫